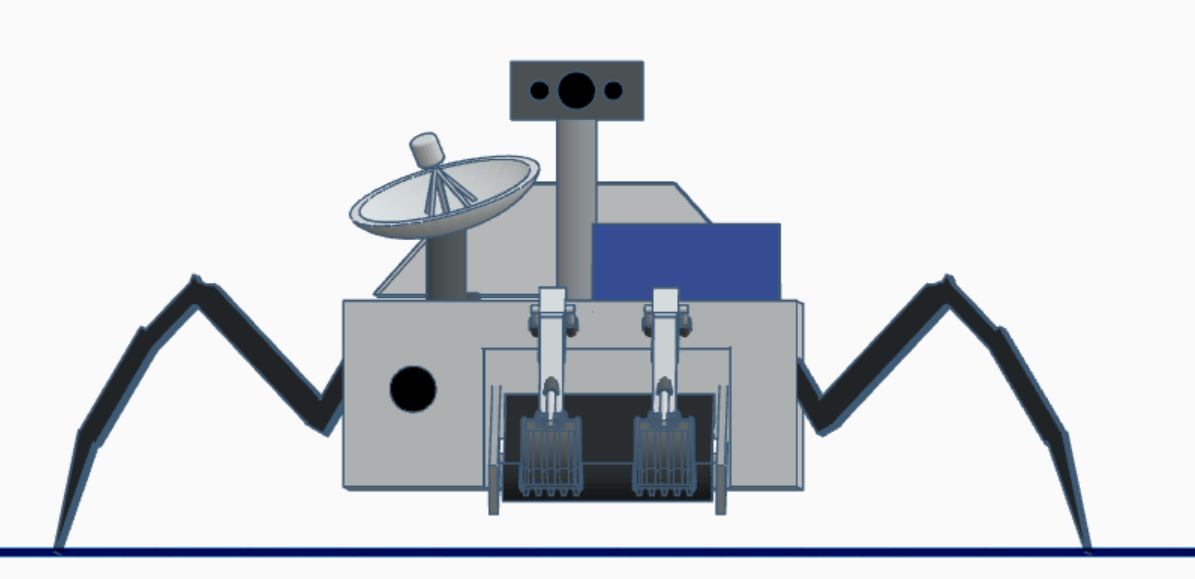
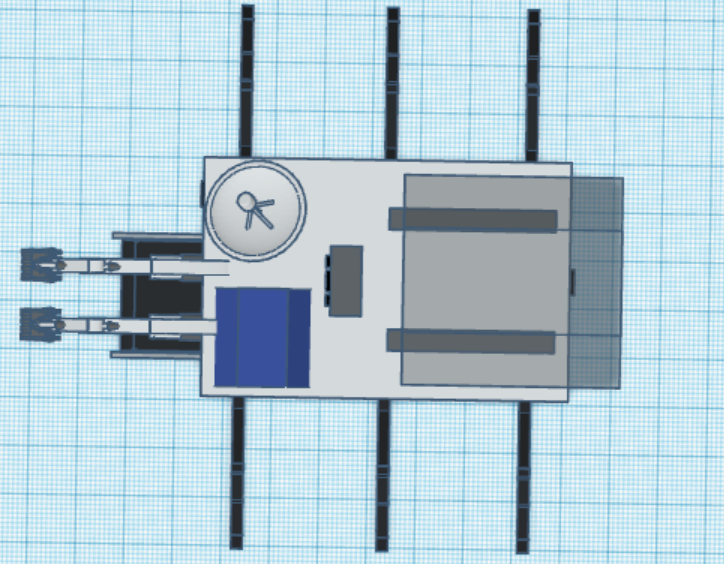
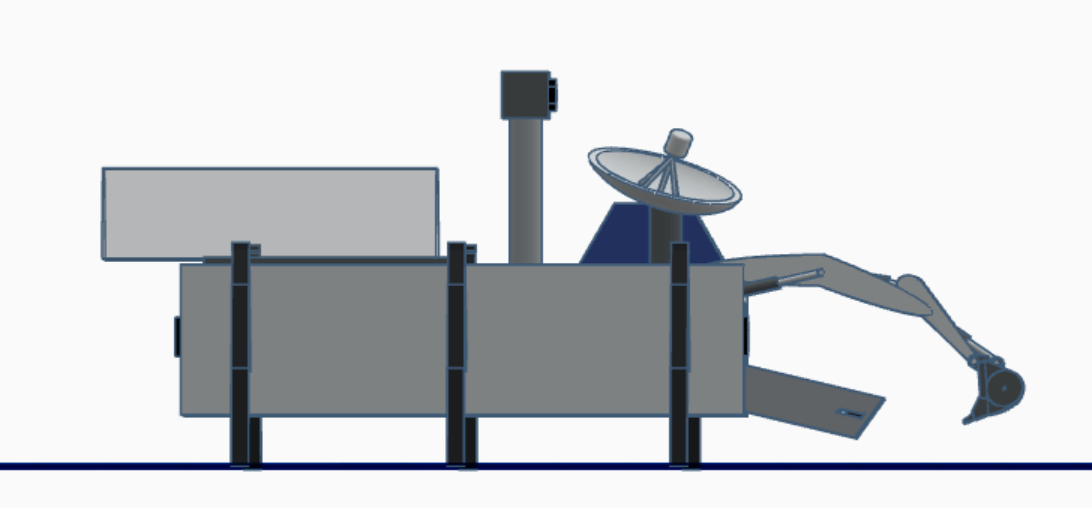
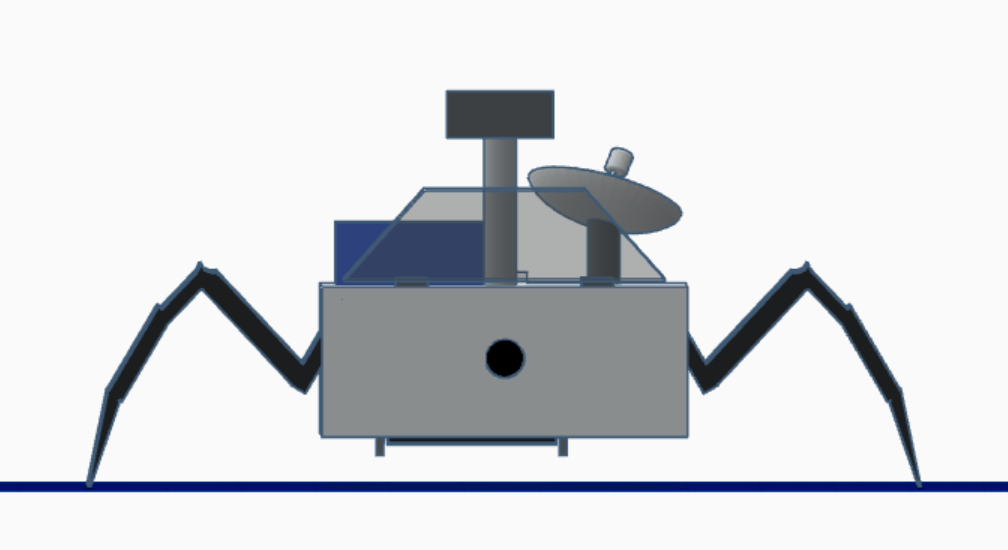
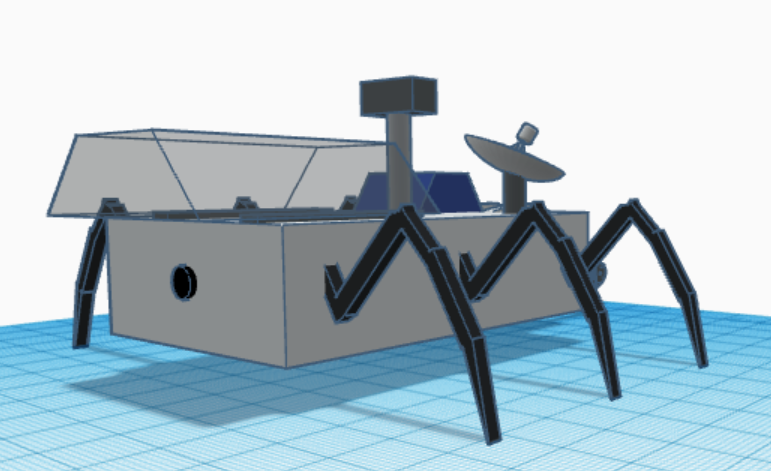
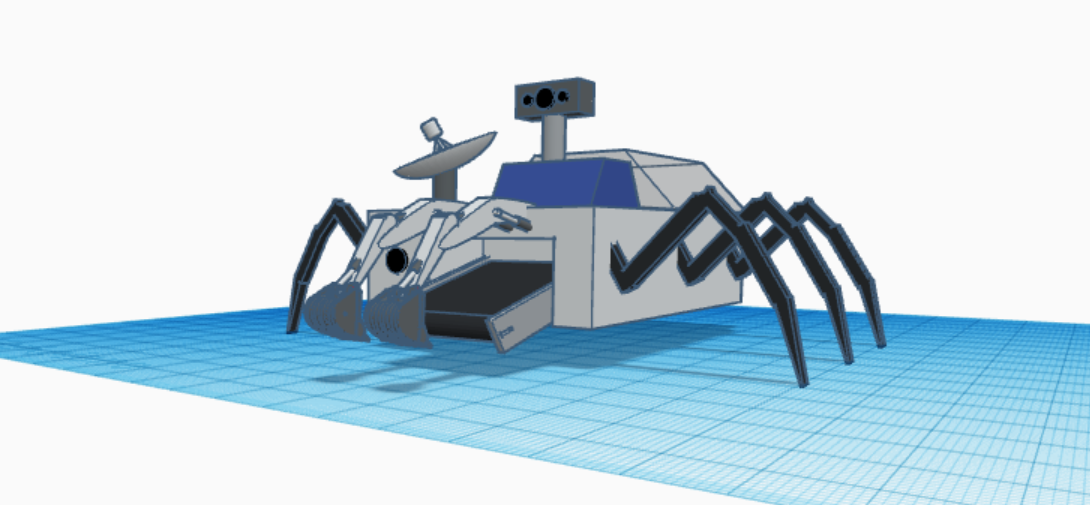
My design uses legs instead of wheels to minimize dust kick-up. The legs bend to adjust the ride height. To ensure the legs don’t sink into the regolith, the pressure exerted by the bottoms of the legs should not exceed one bar. This is my estimation of the amount of pressure one of Neil Armstrong’s boots exerted on the regolith. If it worked for him, it would work for this design. The robot includes a conveyor belt to transport the regolith to the container. This is much faster and more robust than a longer scooping arm to transfer the regolith directly to the chamber. I believe it would be more energy-efficient, too. Most of it would be covered in a conductive fabric to dissipate any charge the dust would’ve accumulated. It includes a rechargeable battery and a solar cell atop a motor to create ultrasonic vibrations and eject the dust.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org